A six-axis hot-dip galvanizing manipulator is used as an example in this essay. Mechanically, the six-axis robotic arm is structurally designed with a 6-degree-of-freedom space coordinate system. All of the six axes work with servo motors with reducers, and finish corresponding actions with servo driver controlled by Karnop Robot control system.
I.
Introduction
With the improvement of the
automation of industrial production lines, Industrial manipulators are
frequently used in production processes such as painting, packaging, welding,
and assembly to replace manual labor in harsh environments. Here, a six-axis
hot-dip galvanizing manipulator is used as an example for description.
Mechanically, the six-axis robotic arm is structurally designed with a
6-degree-of-freedom space coordinate system. All of the six axes work with servo
motors with reducers, and finish corresponding actions with servo driver controlled
by Karnop Robot control system.
2. System
Introduction
1. Characteristics of six-axis
industrial manipulator:
(1) High speed:
Lightweight devices and high-power micro motors are used to increase the speed,
thereby shortening the cycle time and improving production efficiency.
(2) High precision: The
six-axis industrial manipulator adopts high-quality, high-performance harmonic
reducer so that it can be repeatedly positioned in the running project to
ensure accuracy.
(3) Good sealing performance:
the shafts are completely sealed, suitable for use in harsh environments with
high sealing requirements such as dust, oil stains, and harmful gas liquids.
(4) Small in size but can
handle heavy load.
2. Advantages of six-axis
industrial manipulator:
(1) The six-axis
industrial manipulator responses quickly. The robot does not stop or rest
during the operation, and improves the efficiency of automated production.
(2) The six-axis
industrial manipulator has high accuracy and high-quality impact, which ensure
the product quality.
(3) The usage of six-axis
industrial robots can reduce labor costs and waste of raw materials.
(4) It is possible to
adapt to the production of different work pieces by modifying the program,
shortening the product replacement cycle, and investing in application
equipment.
(5) Replace workman, work
in harsh and hazardous environments.
3.
six-axis manipulator requirements for servo
The six-axis galvanized
manipulator is mainly composed of 6 sets of servo drives and motors combined
with reducers to complete the positioning and rotation of the manipulator.
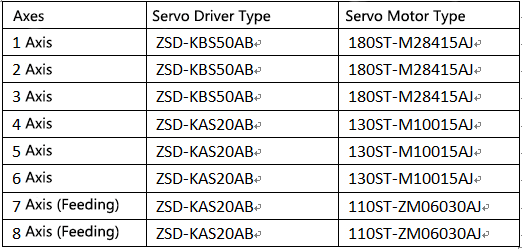
Besides, there are 2 sets of servo drives and motors responsible for feeding. Among
them, 1, 2, and 3 axes are composed of Zhishan ZSD-KBS50AB with 180ST-M28415AJ
motor, and 4, 5, 6 axes are composed of Zhishan ZSD-KAS20AB with 130ST-M10015AJ
motor. The 7 and 8 axes are composed of ZSD-KAS20AB with 110ST-ZM06030AJ motor.
The servo drives all work in position mode, and the robot control system sends
control signals to servo drives to drive the motors to complete the
corresponding actions.
The working scene is shown
in Figure 1:

Figure
1
4.
Introduction of industry matching performance
The host computer is
connected to the servo drive control site. The control mode is pulse +
direction in position mode. The host computer sends a position command to the
servo drive and the servo drive motor completes the corresponding action. The
control wiring is defined as follows:
5. Application
of Zhishan servo on the six-axis manipulator

1. Servo drive and motor
configuration
2. Related parameter
settings
(1) Electronic gear ratio
Control resolution
according to specific application requirements
(2) Speed loop
integral time constant
When this parameter is
reduced, the response can be faster and the speed control error can be less.
However, if the setting is too small, vibration and noise are likely to occur. The
parameter is larger, the rigidity is worse.
(3) Speed loop
proportional gain
When this gain value is
increased, the response can be faster. But if the setting is too large, it is
easy to produce vibration and noise
(4) Position loop gain
Increase the position loop
gain to speed up the system response. Reduce positioning error and shorten
positioning time. However, excessive vibration caused mechanical vibration and
a system position to overshoot.
(5) Rotational inertia
ratio
Ratio of load inertia to
motor shaft inertia
(6) low-frequency jitter
Prone to rapid start and
stop the robot arm end is positioned so that the prolonged positioning influence
production efficiency, the built-in servo control debouncing by PA004 number
parameter bottom jitter suppression function is enabled, by PA413 and PA414
disposed jitter Frequency and damping.


 浙公网安备 33011002011190号 浙ICP备13029913号
浙公网安备 33011002011190号 浙ICP备13029913号 